4.16.4 Tecnología de localización aplicada a la ubicación de una emergencia
Con el paso del tiempo, la forma de concebir el uso de la tecnología marcó un punto de evolución para darle mayor valor al conocimiento y la información. Con el nacimiento de los primeros programas que involucraban necesidades específicas de representar con mayor claridad el mundo, el hardware y el software tuvieron un alto grado de prioridad, sin embargo, el cambio tecnológico vertiginoso favoreció en gran medida su fácil acceso, tanto en lo económico como en su maniobrabilidad.
De ahí que la tendencia del desarrollo de los componentes de un SIG se dirige hacia las habilidades o competencias de los usuarios quienes finalmente deben apoyarse para tomar decisiones, y finalmente, que la información contenga los elementos necesarios para generar los escenarios más precisos y claros.
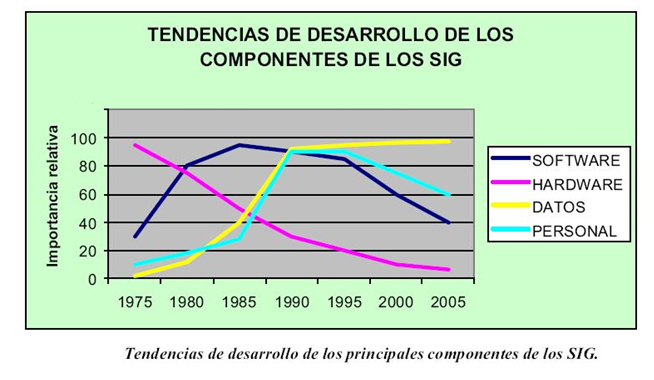
Con esto, no significa que el software y los dispositivos electrónicos pierdan utilidad, por el contrario, gracias a que su margen de contribución al tratamiento de los datos es cada vez más accesible, y aparecen múltiples opciones con diversidad de plataformas, módulos y precios, el interesado deberá realizar un análisis muy preciso de sus necesidades para comparar beneficios y costos.
La tecnología GPS entra dentro de estas consideraciones, y para ello se presenta a continuación un breve pero sustantivo apartado para conocer el modelo de localización mediante posicionamiento global.
4.1 Los sistemas de posicionamiento global
Definición:
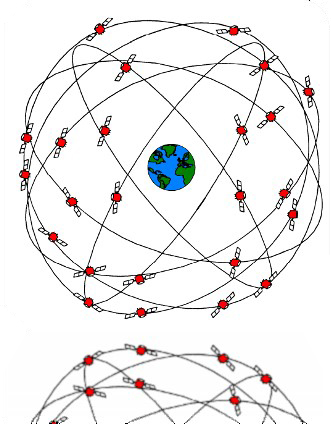
El Sistema de Posicionamiento Global o GPS (por sus siglas en inglés), es un sistema de radionavegación basado en la emisión de señales desde una constelación de 24 satélites. Opera desde 1995 y fue diseñado y promovido por el Departamento de Defensa de los Estados Unidos, originalmente con fines militares , y poco a poco se tuvo acceso para los fines civiles en una versión degradada, es decir, de menor precisión pero que finalmente el avance de la tecnología ha permitido darle mayor precisión para cualquier uso que se requiera.
El GPS permite a un número ilimitado d usuarios calcular con gran precisión y de forma continua tres parámetros (PVT):
![]() Posición 3D (coordenadas en X , Y , altura).
Posición 3D (coordenadas en X , Y , altura).
![]() Tiempo (los satélites emiten información temporal en UTC, Universal Time Coordinated)
Tiempo (los satélites emiten información temporal en UTC, Universal Time Coordinated)
![]() Velocidad del móvil.
Velocidad del móvil.
Además de la calidad con la que se estiman los parámetros PVT , lo que hace del GPS un sistema de enorme utilidad son dos parámetros:
Que es un sistema global, esto es, que la constelación de satélites presentes en el espacio permite que en cualquier lugar y en cualquier momento del planeta, exista la presencia de al menos 4 satélites.
El cálculo PVT se puede ejecutar rápidamente, lo que permite su aplicación para todo tipo de vehículo, sea cual sea su velocidad de desplazamiento (auto, barco, avión, otros.)
El cálculo de la posición en el sistema GPS se basa en la idea de que las coordenadas x,y,z pueden determinarse a partir de las distancias de los objetos, cuya posición es conocida[1].
[1] El-Rabbany,A. (2002): Introduction to GPS. Artech House, Boston / London
- Trimble: GPS Tutorial, http://www.trimble.com/gps/

La calidad del servicio GPS no es absoluta. Algunos elementos del medio ambiente intervienen en la calidad de la precisión como pueden ser edificios altos, cadenas montañosas, líneas frondosas de árboles, y más. Esto debido a que el espacio entre el receptor y los satélites debe estar en lo posible libre de obstáculos. Muchas aplicaciones civiles requieren mayor precisión en el posicionamiento de las que ofrecen SPS o PPS, como por ejemplo: maniobras de aterrizaje de aviones, agricultura, exploración petrolífera, investigaciones geológicas y más.

Para ello, se implementan técnicas que reducen drásticamente el error y se conocen genéticamente como dGPS o GPS diferencial. Este método se basa en la idea de que es posible reducir el error si se correlacionan las distancias medidas de dos o más receptores GPS con los mismos satélites. El método para llevarlo a cabo es:
![]() Usar un receptor de referencia colocado en un punto bien georreferenciado.
Usar un receptor de referencia colocado en un punto bien georreferenciado.
![]() En todo instante de tiempo se calcula la diferencia entre la posición real y la estimada por GPS. Esta diferencia se conoce como corrección diferencial.
En todo instante de tiempo se calcula la diferencia entre la posición real y la estimada por GPS. Esta diferencia se conoce como corrección diferencial.
![]() Mediante algún sistema, por ejemplo vía radio, la corrección diferencial se envía a otros receptores, que de esta forma consiguen eliminar este error. Si esta referencia se encuentra situada en línea de vista del receptor, entonces las correcciones son evidentemente locales. Decimos que es entonces un dGPS local.
Mediante algún sistema, por ejemplo vía radio, la corrección diferencial se envía a otros receptores, que de esta forma consiguen eliminar este error. Si esta referencia se encuentra situada en línea de vista del receptor, entonces las correcciones son evidentemente locales. Decimos que es entonces un dGPS local.
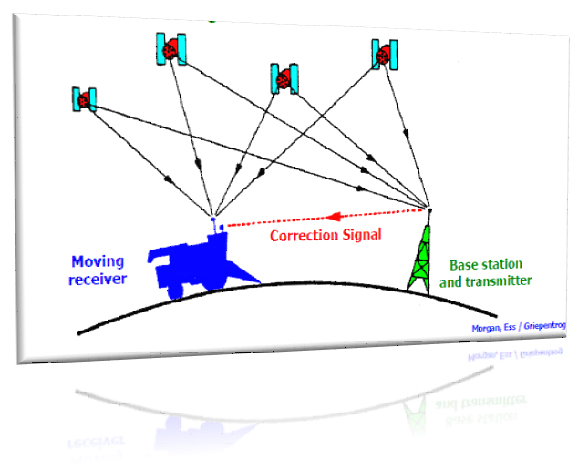
Imagen que muestra el modelo de corrección de posicionamiento empleando el modelo dGPS con una base debidamente georeferenciada. Hans-Werner Griepentrog. Associate Professor, Precision Farming Technology[1].
A medida que la distancia de la referencia va aumentando, la corrección empeora. Para ofrecer dGPS sobre grandes extensiones geográficas, como países o continentes, es necesario instalar una red de estaciones de referencia que tomen los datos locales del GPS. Estos datos se procesan en una estación central, y se transmiten a través de un satélite geoestacionario que corresponde a una red DGPS extensa.
En algunos países de latinoamérica es posible conectar nuestro equipo de posicionamiento global con una señal de corrección diferencia proporcionado por la Red Geodésica Nacional (RGNA)[2] a través del Instituto Nacional de Geografía y Estadística (INEGI, que desde 2010 dejó de usar el término ‘Informática’).
[1] Dept. of Agricultural Sciences, Section AgroTechnology, The Royal Veterinary and Agricultural University. Autumn 2003
[2] Manual de Normas para la Actualización de la Cartografía de Localidades, Dirección Nacional de geografía, INEGI, Marco Normativo, 2006.
Mediante el establecimiento de puntos base, que son las actividades encaminadas a obtener un punto (o más) ligado a la Red Geodésica Nacional Activa y que será empleado para realizar la corrección diferencial GPS (DGPS) de las observaciones efectuadas durante el levantamiento de información en la localidad.
Los levantamientos que se realizan empleando servicio de corrección diferencial en tiempo real vía satélite, radiofaro o cualquier otra fuente proveedora de este servicio, al no requerir posproceso, no necesitan del establecimiento de una estación base, sin embargo se recomienda realizar esta actividad en previsión de posibles problemas en la recepción de la señal de este servicio.
¿Por qué usar GPS en un sistema de atención a emergencias?
El uso de alta precisión para la localización de eventos tiene su fundamento en dos principios básicos:

|
|
Una configuración correcta de mapa y tecnología es aquella donde el mapa y el GPS poseen un máximo de error en la posición de +- 5 metros:
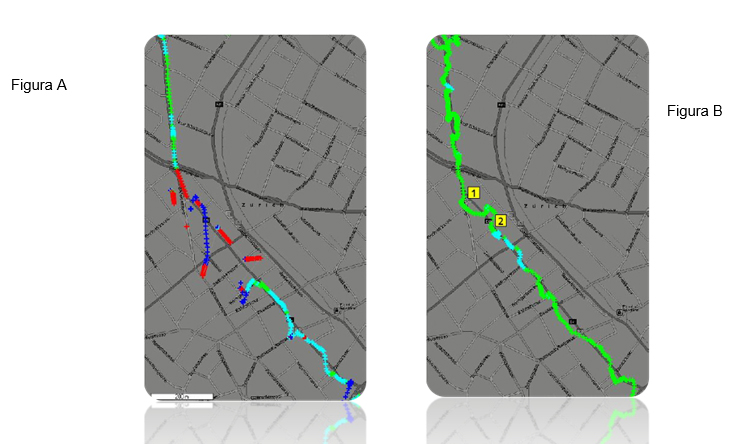
Obsérvese la figura A nos muestra el uso de un sistema sin ningún tipo de calidad en la recepción de señal de satélite. Por momentos, se ha perdido la posición y el grado de error puede superar los 50 metros. Mientras que la figura B, se usa un GPS con un mecanismo que asegura la señal de satélite pero sin corrección diferencial.

La figura C nos muestra un vehículo que ha sido provisto de un equipo DGPS. Obsérvese que la señal es permanente, sin embargo, algunos sitios se tienen problemas por la presencia de elementos urbanos como edificios altos, árboles, puentes de concreto y otros. Aun así, el margen de error no supera los 10 metros en la ubicación de la unidad.
Además, el proceso de actualización de los componentes de un mapa deberá obedecer en todo momento a un método calificado con tecnología de alta precisión basado en DGPS lo que permite una edición con calidad y en tiempos óptimos.
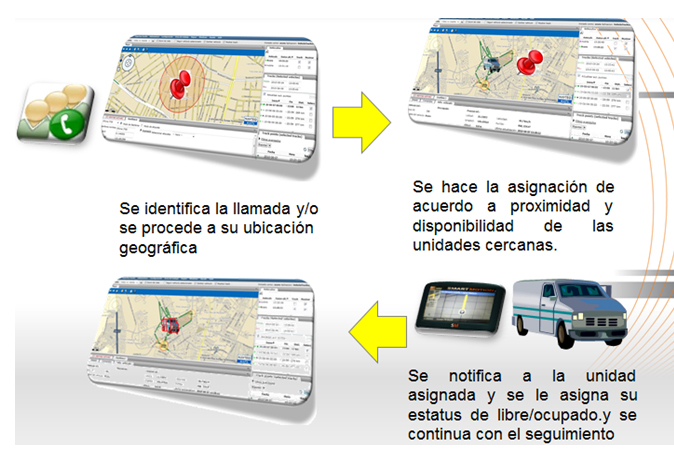
Localización vehicular
En términos generales, AVL (Automatic Vehicle Location) es el seguimiento automatizado de vehículos a distancia, que consiste en la localización de vehículos en viaje o en ruta (dirección, velocidad, etc.), dando así la capacidad de controlar una flota de vehículos desde lejos.
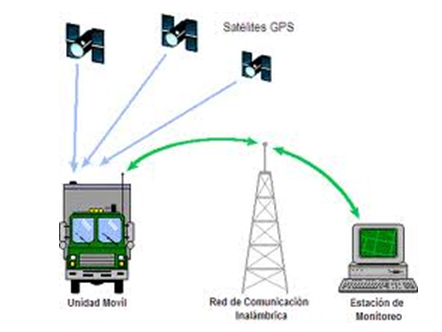
Más comúnmente, la localización del vehículo se determina mediante un posicionamiento global Sistema (GPS), y el mecanismo de transmisión de los datos es un radio por satélite, terrestre o conexión celular desde el vehículo a un receptor vía satélite, receptor de radio, o torre celular cerca.
Para lograr el propósito y los beneficios del AVL, es necesario seleccionar y combinar un grupo de componentes con habilidad en una forma que sea apto para diferentes variables del sistema y sobre todo que cubra necesidades específicas de la organización. Dichos componentes son:
![]() Dispositivo de ubicación (posición geográfica GPS).
Dispositivo de ubicación (posición geográfica GPS).
![]() El método y sistema de comunicación.
El método y sistema de comunicación.
![]() Los mapas.
Los mapas.
![]() Las aplicaciones de procesamiento de datos y los usuarios finales.
Las aplicaciones de procesamiento de datos y los usuarios finales.

Localización Automática de Vehículos (AVL) en auxilio a eventos de emergencia, es un medio para determinar la ubicación y distribución geográfica de un vehículo y transmitir esta información a un punto en que puede ser almacenada y utilizada con cierto tipo de software y aplicaciones de bases de datos.
Por medio de Localización Automática de Vehículos (AVL), se pueden obtener los siguientes beneficios:
a) Despacho directo y seguimiento en vivo.
b) Auditoría y Optimización del rendimiento.
c) El comportamiento de la conducción.
d) Optimización de costos y mantenimiento de vehículos.
e) Seguridad y control remoto del vehículo.